** Currently under maintenance **
Please come back later
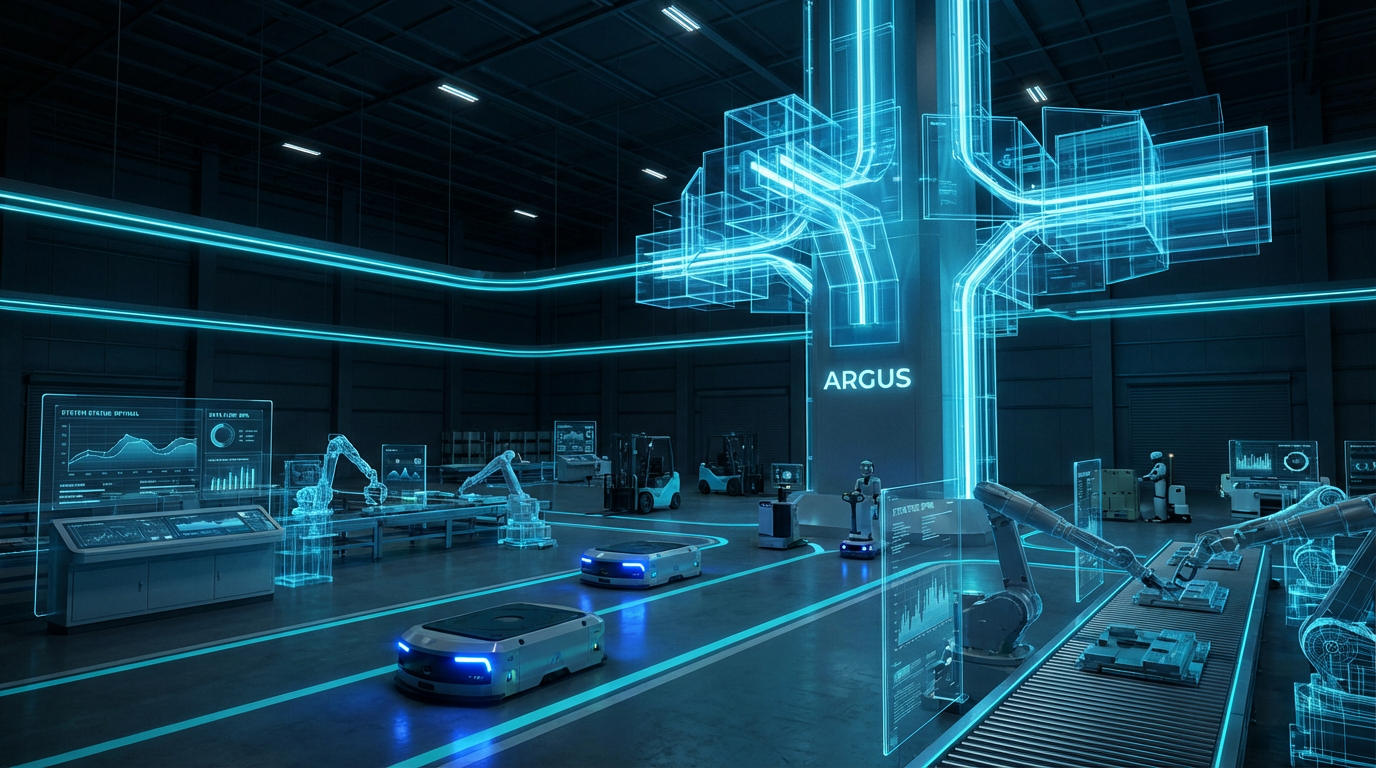
ARGUS: the AI Conductor for Industrial Space.
The Singular AI — Perceive the Whole. Optimize the Yield. Orchestrate the Flow.
Powered by Physical Orchestrated Intelligence (POI), our novel principle of Physical AI.
How does ARGUS work?
1. Perceive the whole site and
create real-time digital twin
2. Derive the optimal solution
for maximum throughput
3. Orchestrates robot actions, operator tasks, and operational improvements
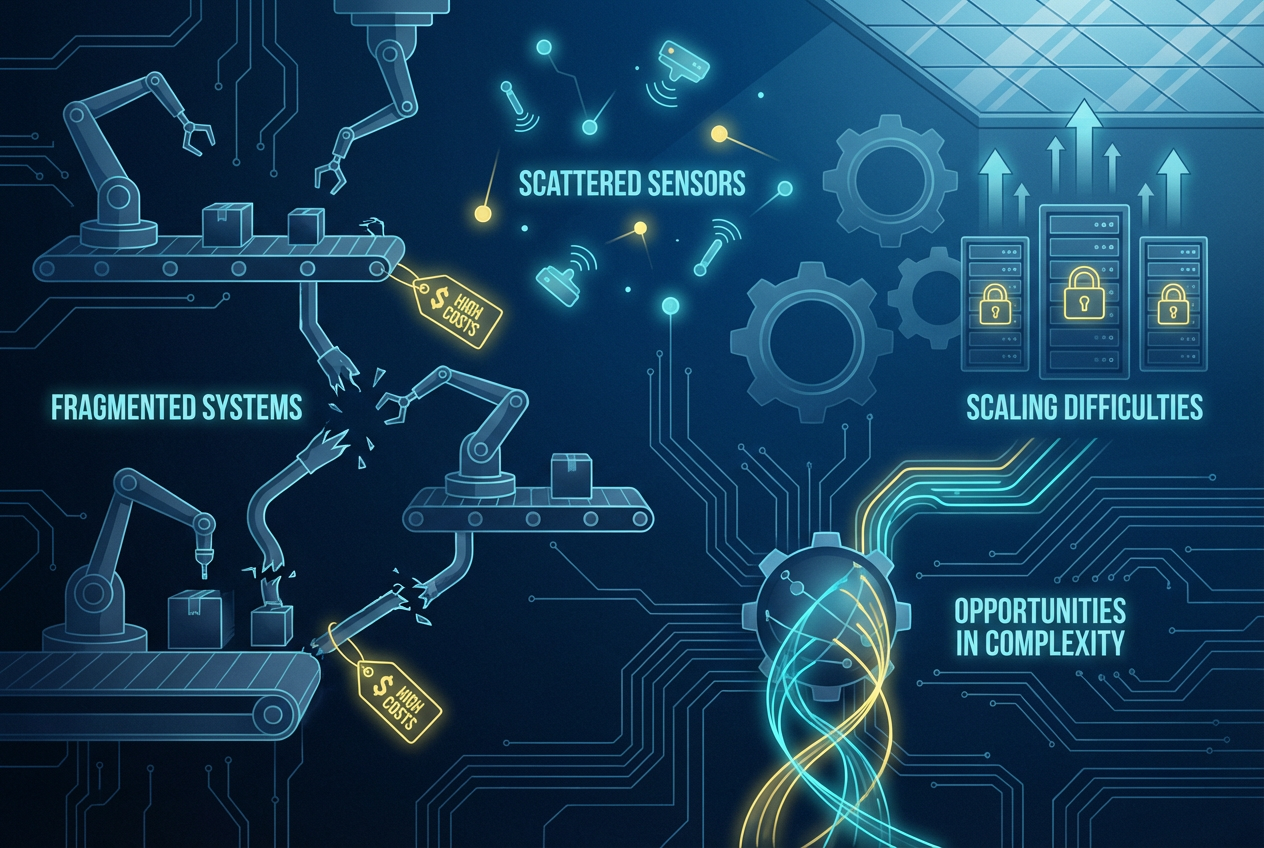
Today’s Industrial AI/DX is Siloed.
Today’s factories rely on disconnected systems — safety, vision, inventory, robots, AGVs — each with its own interface, vendor, and learning curve.
Meet ARGUS —
the AI conductor for your site
ARGUS is a real-time AI system embedded directly into your building.
It connects sensors, machines, robots, and software into one unified intelligence, allowing operators to observe, ask, decide, and orchestrate actions — naturally.
No more switching systems. No more siloed automation.
Example Features
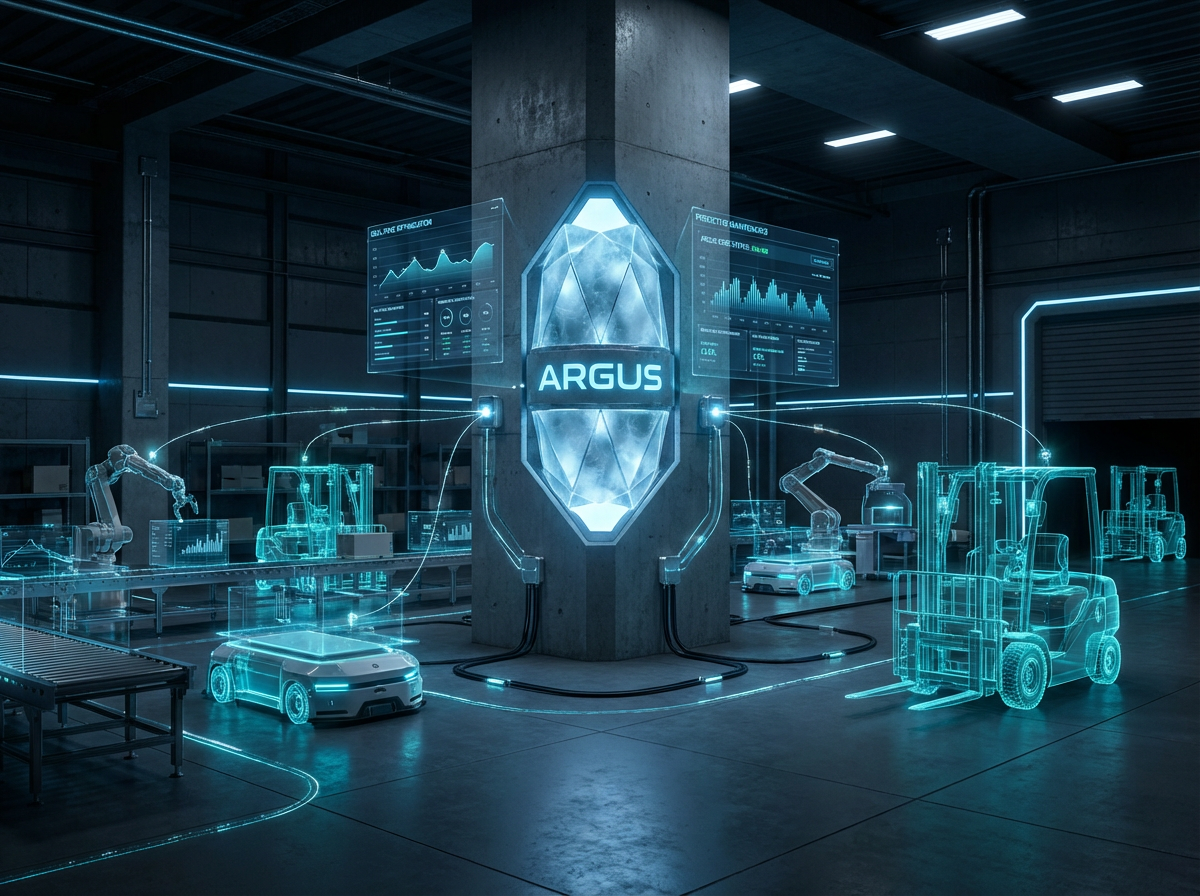
Physical Orchestrated Intelligence.
A new class of Embodied AI that puts the brain in the infrastructure—not just the robot—to orchestrate safety, speed, and flow.
Infographics coming soon ->
Our Team
Koji Shiono
Co-Founder, CEO
Koji is a passionate mobility designer, engineer, and robotics entrepreneur, with extensive hands-on experiences and a holistic understanding of mobility ecosystems. Koji started his career as an automotive software engineer in Michigan, U.S.A., and subsequently moved to the San Francisco Bay Area to work at the cutting edge of autonomous vehicles, until he returned to Japan to start Kidou Systems.
Koji received a B.S.E. in Aerospace Engineering at the University of Michigan.

Prof. Bogdan Epureanu
Co-Founder, CTO
Bogdan is a professor in Mechanical Engineering at the University of Michigan with a courtesy appointment in Electrical Engineering and Computer Science. He received his Ph.D. from Duke University.
He is the Director of the Automotive Research Center, which leads the way in areas of autonomy of ground systems, including vehicle dynamics, control, and autonomous behavior, and fleet operations.
His research focuses on nonlinear dynamics of complex systems, such as teaming of autonomous vehicles and enhanced aircraft safety and performance. His research brings together interdisciplinary teams and consortia such as Government (NIH, NSF, DOE, DOD), Industry (Ford, Pratt & Whitney, GE, Airbus), and Academia. He has published over 350 articles in journals, conferences, and books.